Arduino Air Guitar Gloves
Mission Statement
To enhance the experience of playing air guitar by triggering sounds synchronized with user’s hand movements. The device will be a pair of gloves each fitted with an array of sensors controlled by Arduino circuitry.
 ————-
————-
Who We Are
—————————Daniel Bach—————————————-Jonathan Yong———————
Timeline

Research
Design
Minutes
April 12th
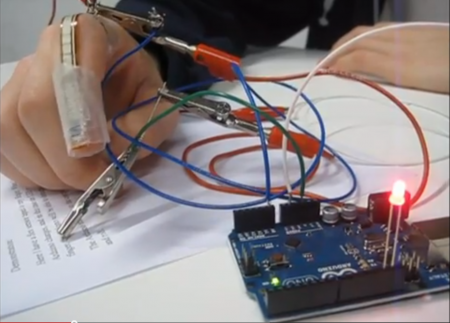
We decided to explore using an IR sensor-receiver as the joint movement detectors. We wired one sensor up on a breadboard and demonstrated the concept. The IR sensors currently appear to be a better option to the potentiometers.
April 3rd
Made our first mock-up of a finger on the glove using mixing straws from Frankie's Kitchen and wire to secure the straws. These materials were used to produce a 'skeleton' that actuated the potentiometers mounted on each joint of the finger. We then hooked up the potentiometers to the Arduino and tested the ability of the straws to communicate joint movement. We found out that while straws are very effective at communicating movement, they aren't very reliable and once bent, become fragile and communicate joint bending poorly. As of right now, we do not have enough analog ports on the Arduino and will have to use the digital inputs on the Arduino. We are currently exploring methods of working around this limitation, as we most likely will not buy a more expensive Arduino.
March 23rd
We put in an order for an accelerometer and tilt sensors from sparkfun.
March 20th
We finally received the potentiometers we ordered for the finger sensors on the glove and started trying to mount them to our hands. We are currently in a trial-and-error process of designing mounts for the potentiometer. We hope to construct a crude mock-up of the glove exoskeleton within the next two weeks.
March 8th
Jonathan and Daniel discussed objectives for the upcoming week. Jonathan found that the ball switch is not very reliable and there is a response delay. For this reason, we are ordering a different tilt sensor. We will test this sensor, a potentiometer we are ordering, and an accelerometer over the break. With these things completed, we will be able to begin prototyping the glove when we return.
March 5th
We met to discuss the parts we needed to buy or construct in order to make the glove. With the help of Prof. Wolf, we agreed on using a potentiometer to measure the bending of the joints of our fingers. We also briefly tested out the functionality of the ball switches in sensing the direction of orientation of our hands. We are considering using a tilt sensor in lieu of the ball switches, as the the ball switches may not be reliable enough for our purposes. Parts that we are considering for the final design may be found in the 'Potential Parts' section of the 'Research' topic on our main page.
February 29th
At the group's meeting with Mike, we discussed our progress in the past week and got some feedback from him. We further explored the possibility of replicating several instruments in the gloves (piano? drums? brass instruments?). Mike suggested that we design with this in mind. For next week, he asked us to start testing different systems that we are considering using. Namely, the Arduino accelerometer, ball switches, and a potentiometer exoskeleton. We will test these systems in the way that they would be used in our glove.
February 27th
We met and discussed how we want our device to function. We discussed how the user will make different guitar sounds. Also, Mike suggested last week that we make the glove capable of playing multiple instruments. We decided that we can use the same technology to make air piano, air drums, and air bass guitar. Finally, we decided to follow Professor Wolf's advice and generate potential designs in Solid Works using rotary potentiometers.
February 24th
We met with Professor Alan Wolf in his office and discussed our project with him. He told us that flex sensors have a lot of noise and break after a while. He suggested that we use rotary potentiometers that are installed on each finger so that they rotate when the finger is bent.
February 16th
We met with John Hawk and Nick Rotella, the two seniors working on the sign language recognition glove. We explained our project and they gave us some suggestions on what materials to use. They are using fiber optic sensors for their glove. This system is difficult to manufacture but reliable. They advised us not to use flex sensors because they do not work very well in practice. Also, they mentioned some other sensors that we might find useful, including ball switches and reed switches.
February 14th
Jonathan and Daniel met and agreed upon pursuing the air guitar project. We established an initial timeline in the form of a Gantt Chart and wrote a problem statement.